


















By Swaati Ketkar
 Mumbai. 28 May 2026. New celestial navigation suite enables resilient autonomous flight with sub-0.1° attitude precision and kilometre-class positioning without reliance on GPS.
Mumbai. 28 May 2026. New celestial navigation suite enables resilient autonomous flight with sub-0.1° attitude precision and kilometre-class positioning without reliance on GPS.
In a major advancement for resilient aerospace autonomy, ESPIRIDI has officially unveiled Star-Nav v3.0, a next-generation celestial navigation architecture engineered to enable autonomous flight in fully GNSS-denied environments. Designed specifically for mission-critical Unmanned Aerial Systems (UAS), the new platform delivers sub-0.1° attitude precision and approximately 4 km-class positioning capability without dependence on satellite navigation signals.
The launch marks a significant evolution from experimental celestial navigation concepts toward a fully flight-grade aerospace architecture optimized for real-world operational deployment. Star-Nav v3.0 is designed to operate as a passive, non-emissive navigation solution capable of sustaining platform survivability in contested electromagnetic environments where GPS jamming and spoofing have become persistent operational threats.
Purpose-built for integration with industry-standard edge computing platforms such as Raspberry Pi and NVIDIA Jetson systems, the architecture has also been optimized for compatibility with the Cube Orange/PX4 autopilot ecosystem, allowing streamlined integration into modern autonomous flight platforms.
According to ESPIRIDI, the platform fundamentally eliminates single-point dependency on GNSS signals by anchoring navigation to the celestial sphere, thereby enabling autonomous systems to maintain reliable orientation and bounded positional awareness even during prolonged electronic warfare scenarios.
Addressing the growing GNSS vulnerability challenge
As electronic warfare capabilities continue to evolve globally, GPS denial and spoofing are increasingly transitioning from isolated tactical concerns into strategic operational realities. Modern autonomous systems operating in contested environments remain highly vulnerable to navigation degradation, where a single signal interruption can result in severe positional drift, loss of mission integrity, or complete platform failure.
Star-Nav v3.0 has been developed specifically to mitigate this vulnerability gap by providing an independent navigation reference framework based on celestial tracking.
Unlike traditional GNSS-reliant systems, the architecture operates passively and is inherently immune to terrestrial electronic interference. By continuously tracking celestial bodies and maintaining a physical ground truth independent of satellite infrastructure, the system transforms what would otherwise be mission-ending navigation failures into manageable failover events.
 ESPIRIDI stated that the architecture is particularly suited for defence, strategic surveillance, long-endurance UAS operations, and future autonomous aerospace applications where survivability in degraded or denied environments is essential.
ESPIRIDI stated that the architecture is particularly suited for defence, strategic surveillance, long-endurance UAS operations, and future autonomous aerospace applications where survivability in degraded or denied environments is essential.
Comprehensive architectural redesign
The transition from Star-Nav v2.0 to v3.0 represents a complete overhaul of the system’s mathematical and computational framework.
While Version 2.0 successfully demonstrated proof-of-concept viability, it reportedly exhibited limitations during rapid manoeuvring and high-dynamic flight conditions. Star-Nav v3.0 addresses these shortcomings through the introduction of statistically optimal estimation filters and hardened numerical stability safeguards.
Among the most significant upgrades is the migration from a traditional Extended Kalman Filter architecture to an advanced Error-State Kalman Filter (ESKF) utilizing tangent-space parameterization based on Micro Lie theory.
This redesign substantially reduces linearization inaccuracies during complex manoeuvres and improves overall flight stability under aggressive dynamic conditions.
The updated system also incorporates fourth-order Runge-Kutta (RK4) integration methods, replacing first-order Euler integration approaches previously susceptible to high-rate rotational errors. According to ESPIRIDI, the RK4 integration framework preserves unit-norm orthogonality even during angular rates reaching 18° per second.
Another critical enhancement involves the implementation of a 1000-star isotropic celestial catalogue that mathematically eliminates “empty field-of-view” conditions. This ensures a greater than 99.9 per cent probability of detecting at least three stars within a 20-degree field of view, thereby maintaining consistent celestial referencing throughout flight operations.
Safety-critical numerical hardening
A key safety innovation introduced in Star-Nav v3.0 is the implementation of the proprietary safe_quat_norm() diagnostic protection mechanism.
Rather than merely identifying quaternion instability events, the architecture actively initiates diagnostic assertions to prevent silent numerical failures that could otherwise trigger catastrophic flight control divergence.
 ESPIRIDI noted that this “fail-fast” philosophy aligns with defense-grade aerospace safety requirements by ensuring that invalid state data cannot propagate into flight control computations. Instead, the flight computer can immediately trigger recovery protocols and maintain platform stability.
ESPIRIDI noted that this “fail-fast” philosophy aligns with defense-grade aerospace safety requirements by ensuring that invalid state data cannot propagate into flight control computations. Instead, the flight computer can immediately trigger recovery protocols and maintain platform stability.
The company believes this safety layer represents a crucial step in transitioning celestial navigation systems from laboratory experimentation toward operational aerospace deployment.
Advanced Celestial Pattern Recognition and Precision Tracking
The celestial detection pipeline within Star-Nav v3.0 has been engineered for high-fidelity star recognition and rapid orientation determination.
Validation exercises reportedly demonstrated:
- 100 per cent precision with zero false-positive star identifications.
- 94.5 per cent recall performance even near sensor noise thresholds.
- O(1) geometric hashing capability enabling instantaneous cold-start orientation acquisition following signal loss.
This capability allows the platform to rapidly recover orientation without relying on external navigation infrastructure.
The ESKF architecture itself utilizes a six-state error parameterization that continuously tracks both three-vector attitude error and gyroscope bias with exceptional stability. By operating within the tangent space of the SO(3) rotational group, the system avoids many of the singularities and instability conditions associated with conventional estimation approaches during complex manoeuvring.
StarPositionSolver Enables Satellite-Independent Global Positioning
One of the most strategically significant capabilities within Star-Nav v3.0 is the introduction of the StarPositionSolver module, which enables autonomous global position estimation in total GPS-denied conditions.
The module determines observer position by identifying celestial objects and measuring their angular relationship relative to the local vertical axis. Using zenith-angle intersection methodologies and Nelder-Mead optimization techniques, the system resolves latitude and Local Sidereal Time (LST) even in the presence of noisy sensor data.
 ESPIRIDI validated the positioning framework through simulations conducted across multiple global locations, including London, Tokyo, and Sydney. Reported positional errors remained consistently below 0.85 km during testing:
ESPIRIDI validated the positioning framework through simulations conducted across multiple global locations, including London, Tokyo, and Sydney. Reported positional errors remained consistently below 0.85 km during testing:
- London: 0.82 km.
- Tokyo: 0.83 km.
- Sydney: 0.84 km.
While not intended to replace the precision of conventional satellite navigation systems in permissive environments, ESPIRIDI emphasized that the strategic value of the system lies in ensuring mission continuity and platform recovery during severe GPS disruption events.
Adaptive GPS Integrity Monitoring and Smooth Failover
To further enhance operational resilience, Star-Nav v3.0 incorporates a sophisticated GPS Integrity Monitoring framework capable of detecting advanced spoofing and jamming attempts.
Using Receiver Operating Characteristic (ROC) analysis, ESPIRIDI established an optimal detection threshold of 13.0 dB-Hz, achieving a reported F1-score of 0.992 in distinguishing legitimate environmental disturbances from malicious interference attempts.
Upon anomaly detection, the platform’s Adaptive ESKF initiates a controlled five-second soft-ramp transition from GNSS-based navigation to celestial tracking. This gradual handover avoids covariance discontinuities commonly associated with abrupt failover switching and ensures continuous flight controller stability throughout the transition process.
Rigorous Mission Validation Demonstrates Flight Readiness
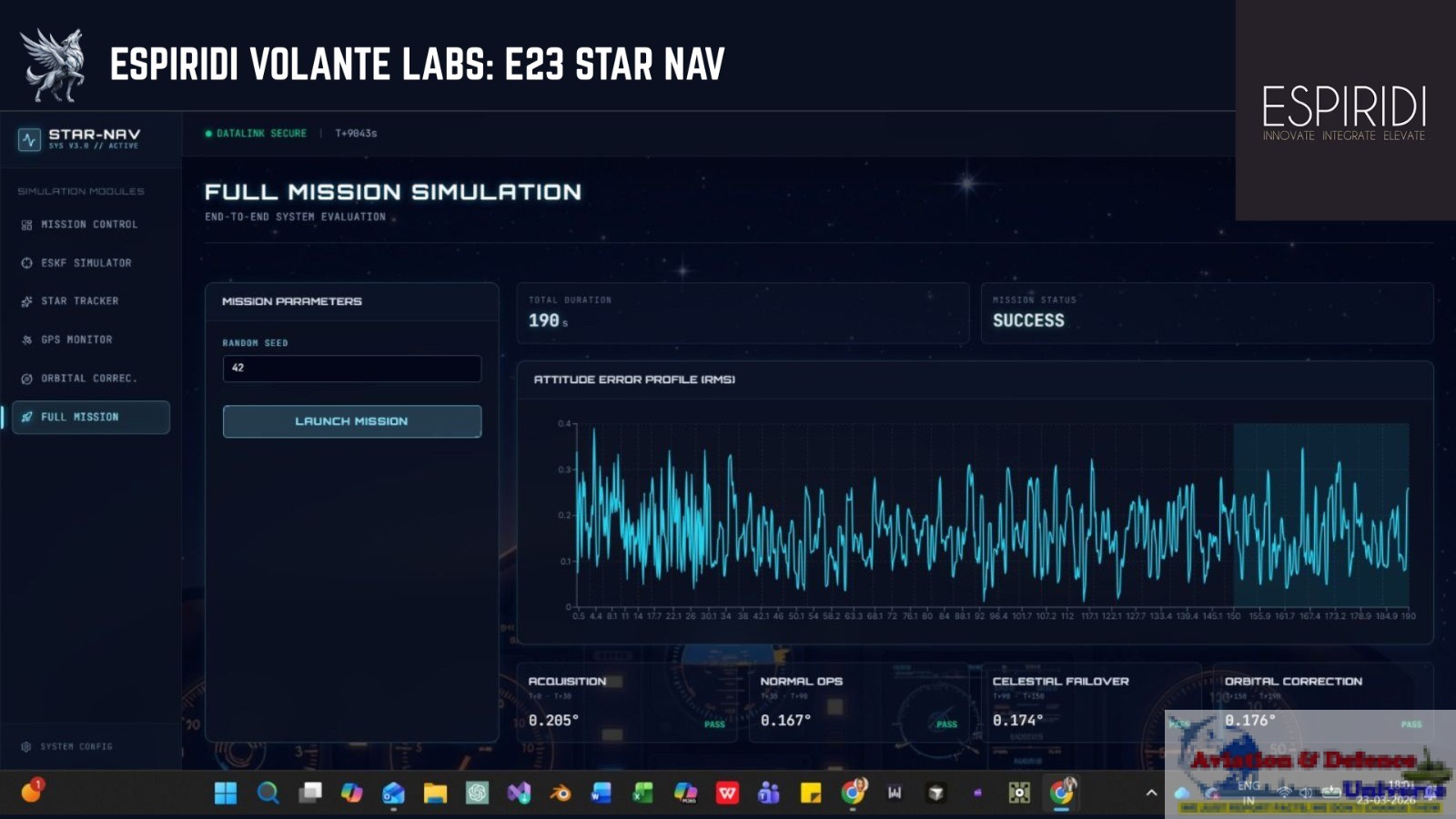
ESPIRIDI confirmed that Star-Nav v3.0 has completed an extensive four-phase mission simulation campaign designed to validate operational readiness for immediate flight integration.
The validation programme included:
- Normal GPS Operations.
- GPS Jamming and Autonomous Failover.
- Orbital Correction Manoeuvres.
- GPS Signal Recovery.
Across all phases, the system reportedly maintained RMS attitude errors well below the platform’s mission requirement threshold of 0.5°.
Particular emphasis was placed on the Orbital Correction Manoeuvre phase involving a complete 360-degree yaw sweep. According to the company, this exercise demonstrated the effectiveness of the ESKF framework in nullifying gyroscope bias through symmetric averaging techniques while preserving overall flight stability.
Mission validation results included:
- Normal GPS Phase: 0.1224° RMS error.
- GPS Jammed + Failover: 0.2241° RMS error.
- Orbital Correction: 0.2114° RMS error.
- GPS Recovery: 0.1124° RMS error.
With all test phases successfully meeting mission thresholds, ESPIRIDI stated that Star-Nav v3.0 is now validated for integration with CMOS star-camera and MEMS IMU-equipped aerospace platforms.
Positioning for the future of resilient aerospace autonomy
 The unveiling of Star-Nav v3.0 comes at a time when militaries and aerospace developers worldwide are increasingly prioritizing resilient autonomous navigation architectures capable of operating independently of vulnerable terrestrial and satellite infrastructure.
The unveiling of Star-Nav v3.0 comes at a time when militaries and aerospace developers worldwide are increasingly prioritizing resilient autonomous navigation architectures capable of operating independently of vulnerable terrestrial and satellite infrastructure.
By combining celestial navigation, advanced state estimation, adaptive failover systems, and hardened aerospace safety mechanisms into a deployable flight-grade package, ESPIRIDI aims to position itself at the forefront of next-generation resilient autonomy solutions.
The company believes the architecture has broad applicability across defence UAS platforms, high-altitude pseudo satellites, autonomous surveillance systems, and future aerospace autonomy ecosystems operating in contested electromagnetic domains.







































































-A4-Size-(2)_page-0001.jpg)