






























- Suborbital rocket and helicopter test flights validate sensors and landing subsystems for the company’s lunar ambitions.
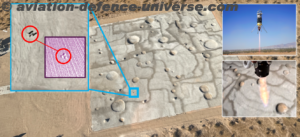 Mojave, CA – April 25, 2025 – Astrobotic completed a robust terrestrial flight test campaign for their suite of lunar landing Guidance, Navigation, and Control (GNC) technologies, vital for the Deorbit, Descent, and Landing (DDL) phase of missions to the Moon. The company’s Terrain Relative Navigation (TRN), and Hazard Detection and Avoidance (HD&A) systems were verified to accurately detect and avoid surface hazards, like rocks and small craters, as small as 15 cm (or around 6 inches).
Mojave, CA – April 25, 2025 – Astrobotic completed a robust terrestrial flight test campaign for their suite of lunar landing Guidance, Navigation, and Control (GNC) technologies, vital for the Deorbit, Descent, and Landing (DDL) phase of missions to the Moon. The company’s Terrain Relative Navigation (TRN), and Hazard Detection and Avoidance (HD&A) systems were verified to accurately detect and avoid surface hazards, like rocks and small craters, as small as 15 cm (or around 6 inches).
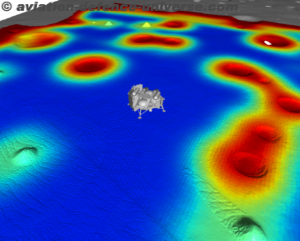
The test flights, conducted at Astrobotic’s Lunar Surface Proving Ground (LSPG) in Mojave, CA and at additional sites over the deserts of Death Valley, CA, used both a helicopter and Astrobotic’s own Xodiac vertical-takeoff vertical-landing suborbital rocket to evaluate these essential landing subsystems. The subsystems combine hardware and integrated software to detect surface hazards too small for orbital data to capture, ensuring safe and precise autonomous lunar landings. Working together, these subsystems use camera and LiDAR data to determine position and avoid hazards, navigating accurately to the predetermined landing zone and selecting the safest specific site within the zone.
 “DDL for safe, precise lunar landings are one of the most significant and complex challenges facing the commercial lunar industry,” said Brett Shaffer, Lead Systems Engineer at Astrobotic, “This terrestrial flight test campaign validates our critical landing subsystems, which work together to scan and analyze terrain in real-time, enabling landers to autonomously identify and select the safest landing sites.”
“DDL for safe, precise lunar landings are one of the most significant and complex challenges facing the commercial lunar industry,” said Brett Shaffer, Lead Systems Engineer at Astrobotic, “This terrestrial flight test campaign validates our critical landing subsystems, which work together to scan and analyze terrain in real-time, enabling landers to autonomously identify and select the safest landing sites.”
Astrobotic’s Lunar Surface Proving Ground provides the most realistic test field of practical scale for lunar landings worldwide. Its topography is modeled from a patch of the lunar south pole. The deserts of eastern California offer the largest, most lunar-like landscape available in the United States. The test campaign captured nearly one million square meters (over 2,200 football fields) of terrain data and simulated the spacecraft’s hover and descent profiles, ensuring the subsystems’ capability to handle motion-induced distortions.
 “Astrobotic’s Xodiac reusable rocket provides a workhorse platform for integrated testing of key lunar and planetary spacecraft systems, like our advanced landing sensor suite. This unique vertical integration accelerates the development of solutions needed for precise lunar landings,” says Dan Hendrickson, Astrobotic’s Vice President of Business Development.
“Astrobotic’s Xodiac reusable rocket provides a workhorse platform for integrated testing of key lunar and planetary spacecraft systems, like our advanced landing sensor suite. This unique vertical integration accelerates the development of solutions needed for precise lunar landings,” says Dan Hendrickson, Astrobotic’s Vice President of Business Development.
Results of the recent flight test campaign demonstrate the ability of Astrobotic’s landing subsystems to reliably determine the lander’s position and to detect potential hazards in a demanding, flight-like, real-time environment. The suite of sensors, computing hardware, flight software, and interfaces were all verified to have sufficiently detected the full range of lunar surface hazards, accurately identifying and avoiding rocks and other debris as small as 15 cm. The system also attained a landing accuracy within a 50 m radius of positional knowledge via terrain relative navigation.
“The results of our rigorous test campaign on these systems, including both in controlled environments in the lab and in the real-world scenarios, have galvanized our team’s belief in the system’s precision landing and hazard detection capabilities,” said Shaffer, “Work is ongoing to complete the full analysis of data collected that will inform future development and help our team fine-tune the system’s hardware and software configurations prior to Astrobotic’s upcoming Griffin Mission One.”
Astrobotic’s TRN and HD&A subsystems will fly on Griffin Mission One (Griffin-1), the maiden voyage of Astrobotic’s mid-size lunar lander, where it will help ensure a safe landing at the Moon’s south pole. The systems will proceed with integration onto the Griffin spacecraft during Q2 of 2025.